RIOS-Lab
Posted on
12/06/2023
RIOS Lab student Yifei Zhu was invited to give a talk on GreenRio: A Linux-Compatible RISC-V Processor Designed for Open-Source EDA Implementations at RISC-V Summit Europe. She introduced the background and shared her experience on this project.

Fig.1 Yifei Zhu gave a talk at RISC-V Summit Europe

Fig.3 Group photo of RIOS Lab Students and RISC-V Foundation CEO Calista Redmond
Background
Traditional fabrication methods often require large margins to ensure functional performance, But the adoption of public tool chains and open PDK can recycle these margins by the wisdom of the masses. Because, EDA licenses will no longer serve as a bottleneck to design space exploration in this field.
Therefore, we are trying to answer whether the open EDA tools are competent for building a modern processor? What’s the gap between open and proprietary ASIC fabrication flow? That’s why we build GreenRio, a RISC-V core with modern processors characteristics.
Through building such non-toy-like design, we optimized the OpenEDA along with the RISC-V architecture together and explore every stage of this flow.

Fig.2 Milestone of GreenRio
GreenRio1.0 is a 7-stage, dual-issue, out-of-order (OoO) processor. We demonstrated it in the efabless OpenMPW-7 program using the Skywater 130nm process. Related works were accepted by the Workshop on Open-Source EDA Technology (WOSET) as well as RISC-V Days Tokyo 2022 Autumn2. Greenrio 2.0 adds more hardware supports allowing for running applications. GreenRio2.0 has won the ISSCC Code-a-Chip competition and is becoming a benchmark in the OpenEDA domain.
User Experience of Open Toolchains
One of the challenges that the community faces is the gap between open and proprietary tools in terms of QoR and runtime. So We quantified this gap by hardening GreenRio. We used open EDA Tools: OpenROAD/OpenLANE versus appropriate EDA tools: Genus/Design Compiler/Innovus to harden this design.
We can concluded that:
- The open pdk lack of process corners and key parameters for timing optimization, also exists bugs
- Compared to propriety tools, the open one is not complete enough and needs further optimization
- For logic synthesis, propriety tools bring about smaller area, less gate count and lower leakage power. But the open tools win in synthesis time and can get time convergence netlists without human adjustment.
- For physical implementation, compared to Innovus, open tools cannot achieve higher core utilization and higher cell density. Currently, it is inferior in both runtime and performance, because its placement/routing engines are out-of-date.
- For the runtime allocation, open tools spend most of the time in routing, but the other one puts more effort in placement.
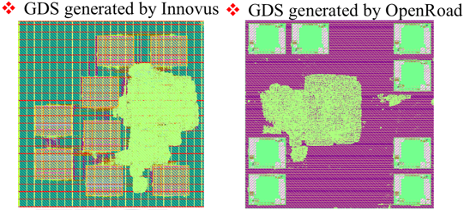
Fig.3 Different macro placement